도움이 필요하시면 언제든지 저희에게 연락해주세요.






| 제품명 | 모델 번호 | 명세서 | 작업 길이 |
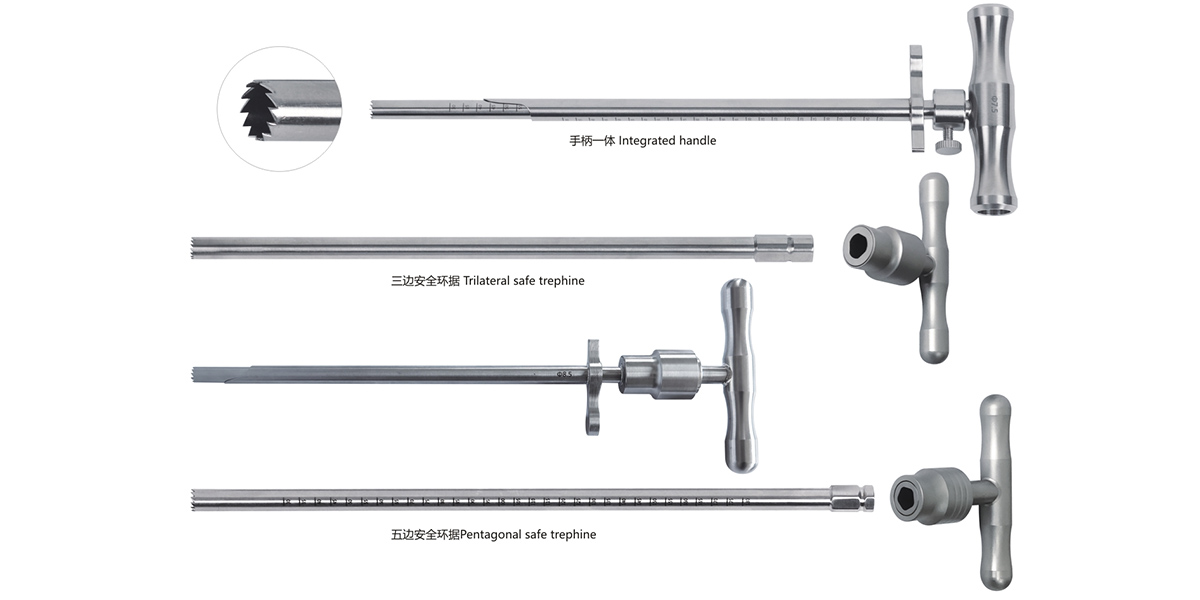
| Trephine 핸들 통합 | S607.003A | 5.0mm | 230mm |
| Trephine 핸들 통합 | S607.004A | 6.5mm | 230mm |
| Trephine 핸들 통합 | S607.005A | 7.5mm | 230mm |
| Trephine 핸들 통합 | S607.006A | 8.2mm | 230mm |
| Trephine 핸들 통합 | S607.007A | 8.5mm | 230mm |
| 트레핀 핸들 분할(삼각) | S607.003B | 5.0mm | 210mm |
| 트레핀 핸들 분할(삼각) | S607.004B | 6.5mm | 210mm |
| 트레핀 핸들 분할(삼각) | S607.005B | 7.5mm | 210mm |
| 트레핀 핸들 분할(삼각) | S607. 006B | 8.2mm | 210mm |
| 트레핀 핸들 분할(삼각) | S607.007B | 8.5mm | 210mm |
| 트레핀 핸들 분할(오각형) | S607.003C | 5.0mm | 210mm |
| 트레핀 핸들 분할(오각형) | S607.004C | 6.5mm | 210mm |
| 트레핀 핸들 분할(오각형) | S607.005C | 7.5mm | 210mm |
| 트레핀 핸들 분할(오각형) | S607.006C | 8.2mm | 210mm |
| 트레핀 핸들 분할(오각형) | S607.007C | 8.5mm | 210mm |
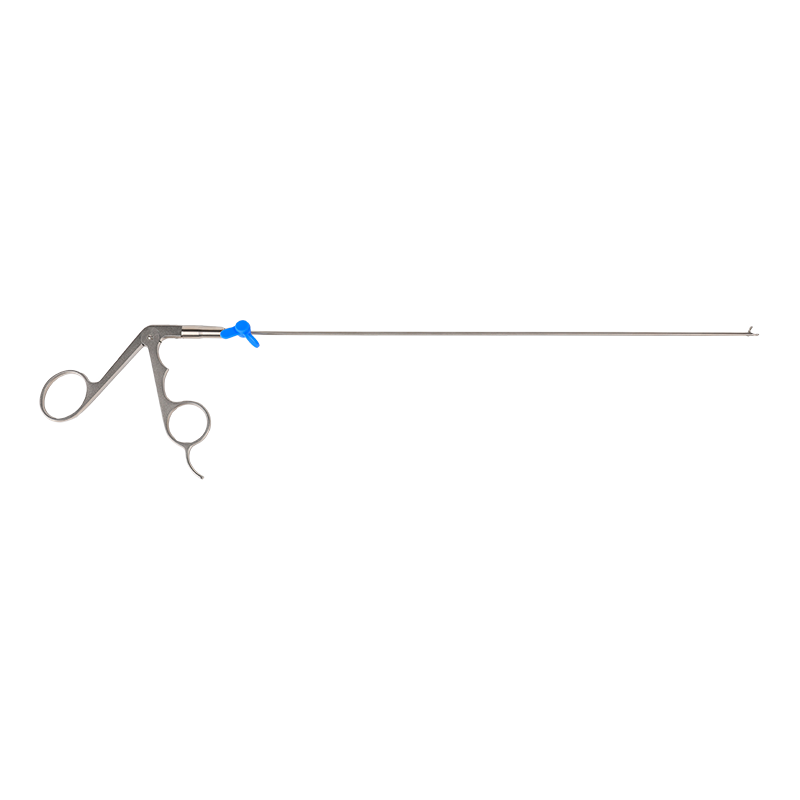
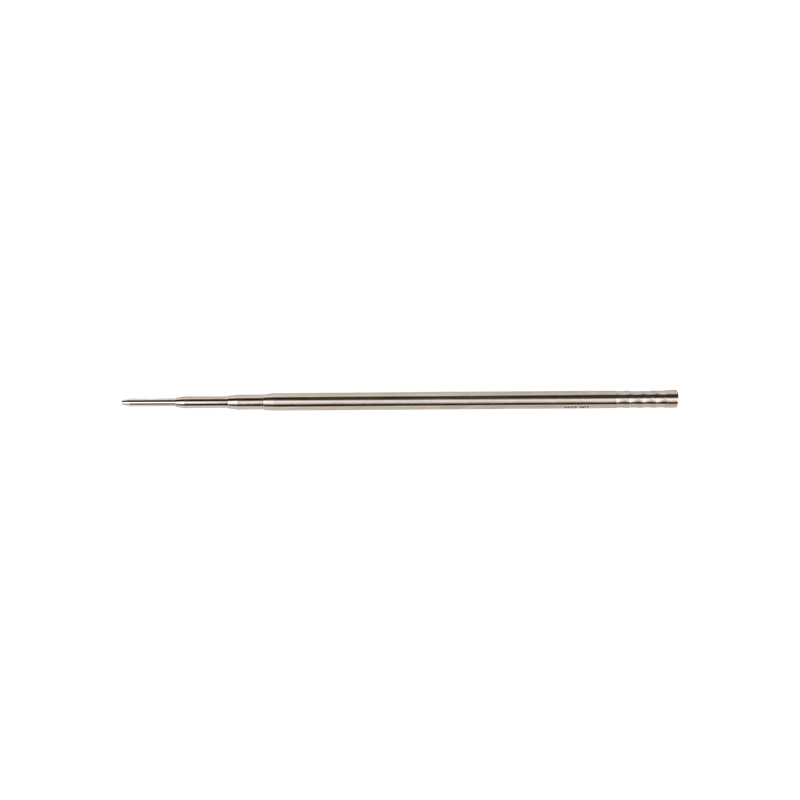
| 트레핀 캐뉼라 | S607.003-T | 6mm | 170mm |
| 트레핀 캐뉼라 | S607.004-T | 7.5mm | 170mm |
| 트레핀 캐뉼라 | S607.005-T | 8.5mm | 170mm |
| 트레핀 캐뉼라 | S607.006-T | 9.0mm | 170mm |
| 트레핀 캐뉼라 | S607.007-T | 9.5mm | 170mm |
의료용 내시경 제품의 R&D, 제조 및 판매에 종사하는 하이테크 기업입니다. 2016년에 설립된 Tonglu-Hangzhou에 위치하고 있습니다. Sconor는 항상 "규범적, 집중적, 개척적 및 혁신적"이라는 비즈니스 철학을 고수합니다.
이 웹사이트에 제공된 정보는 중화인민공화국 이외의 국가 및 관할권에서만 사용하도록 의도되었습니다.
30개국 이상으로 수출되었습니다.
우리는 20명 이상의 R&D 인력을 보유하고 있습니다.
2016년부터 7년 이상의 경력을 갖고 있습니다.

최신 뉴스와 전시회에 주목하세요
Hangzhou Sconor Medical Technology Co., Ltd.는 첨단 기술 기업 중 하나에서 연구 개발, 생산, 판매, 유지 관리 및 서비스를 제공하는 회사입니다.
모바일 QR 코드